北理工学子荣获2020 ICGNC李明最佳论文奖
发布日期:2020-11-02 供稿:宇航学院 王佳楠 摄影:王佳楠
编辑:杨丽静 审核:龙腾 阅读次数:
日前,北理工宇航学院研究生闭昌瑀在2020年国际制导、导航与控制学术会议上发表的论文“Event-triggered Formation Control for Multi-agent Systems Using Terminal Sliding Mode Method”荣获李明最佳论文奖。
国际制导、导航与控制学术会议(ICGNC)是目前中国最大的航空、航天、航海、陆地等运动体制导、导航与控制(GNC)领域的国际学术会议,每两年举办一次,已经成功举办8届。本届会议于10月23日至25日在天津举行,邀请了包为民院士、陈志杰院士和苏东林院士分别作制导、导航与控制相关的大会报告。会议共收到811篇论文,经过严格评审最终共616篇文章被收录。李明最佳论文奖是2014年由中国工程院院士李明出资设立,旨在奖励45岁以下的优秀青年科技工作者,鼓励国内外更多的青年人投身于制导、导航与控制的前沿性学术研究和关键性技术创新,每届不超过1名,截止2020年,共7人获奖。
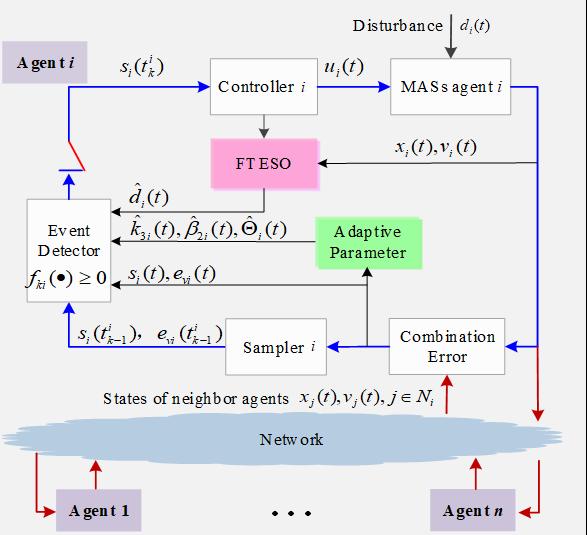
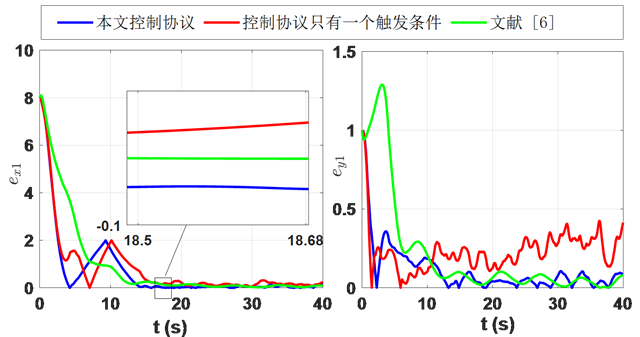
获奖论文在王佳楠副教授指导下,由博士后王丹丹和研究生闭昌瑀共同撰写完成。文章针对带有干扰的二阶多飞行器系统,首次利用非奇异终端滑模方法和自适应增益方法,设计了一种全新的完全分布式事件触发控制协议,并提出了4个事件触发条件,与单个事件触发条件相比,具有更高精度和更低触发频率,通过引入一种有限时间扩张状态观测器,进一步降低了触发次数和抖振频率,根据李雅普诺夫定理证明了闭环系统实际有限时间稳定性。
北京理工大学系统与仿真实验室40年来一直以飞行器为对象,开展目标信息探测与识别、运动体的稳定控制与制导、精确制导控制系统、系统建模与仿真等方向的研究和教学工作。实验室具有完备的飞行器半实物仿真系统和无人机室内实物验证平台。多年来在制导航空弹药的装备研制中担任了国家队的角色。2004年以来共获国家二等奖3项,省部级二等奖2项、三等奖1项。近年来在基于视觉的定位、导航、识别与跟踪,无人机智能控制,集群系统分布式探测、协同控制与协同制导方面取得了一定成果,获自然科学基金、火箭军、军科委和横向项目资助,发表多篇顶刊论文。

主要贡献者博士后王丹丹在站期间主要针对多飞行器协同制导与控制问题开展研究,作为通信作者发表《IEEE Transactions on Cybernetics》(IF:11.079)和《Journal of the Franklin Institute》(IF:4.036)等控制领域顶刊,出版中文教材1部,获得博士后站前特别资助。研究生闭昌瑀主要研究多飞行器系统协同控制技术,截至目前发表会议论文1篇,投稿期刊论文1篇,申请发明专利1项,担任队长带领队伍入围“飞鲨杯”第六届中国研究生未来飞行器创新大赛实物类决赛阶段。
分享到: